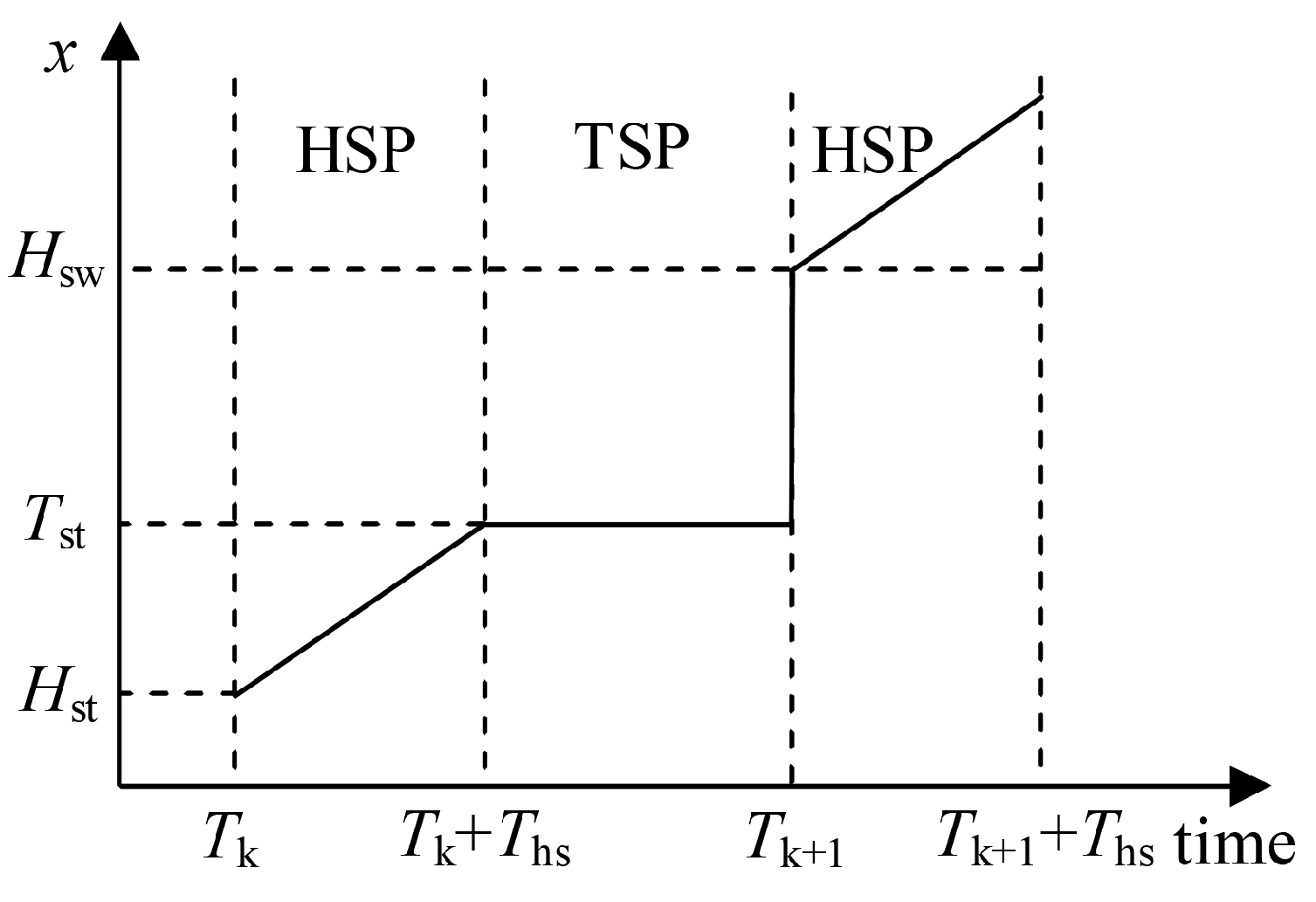
A single gait cycle of the human walking pattern. In the single support


Figure 1 from Human-Like Walking with Heel Off and Toe Support for Biped Robot

A single gait cycle of the human walking pattern. In the single support
Applied Sciences, Free Full-Text

A single gait cycle of the human walking pattern. In the single support

PDF) Human-Like Walking with Heel Off and Toe Support for Biped Robot
Applied Sciences, Free Full-Text

Applied Sciences, Free Full-Text

Yixiang LIU, PhD, Doctor of Engineering, Shandong University, Jinan, SDU, School of Control Science and Engineering
PDF) Human-Like Walking with Heel Off and Toe Support for Biped Robot

A single gait cycle of the human walking pattern. In the single support

PDF) Human-Like Walking with Heel Off and Toe Support for Biped Robot

Figure 1 from Human-Like Walking with Heel Off and Toe Support for Biped Robot

Yixiang LIU, PhD, Doctor of Engineering, Shandong University, Jinan, SDU, School of Control Science and Engineering

Yixiang LIU, PhD, Doctor of Engineering, Shandong University, Jinan, SDU, School of Control Science and Engineering